
フィジカルAI開発の背景と目的
近年、ロボットや機械を通じて現実世界で作業を行うフィジカルAI(物理空間で動作するAI)への関心が高まっています。現場でロボットが対象物を扱うには、認識や動作計画だけでなく、対象物に触れ、掴み、動かす「最後の接点」を安定させることが極めて重要です。
産業現場には多品種・少量生産や位置ずれ、ワーク形状のばらつきといった課題が存在しています。AIが正しく対象を認識しても、最後の接触で滑りや把持ミスが発生すれば実運用には至りません。同社は、物理接触インターフェースである「柔軟指」と、作業を学習・評価・改善するソフトウェア基盤を組み合わせることで、こうした課題の解決を目指すとしています。
 Ms.ガジェット
Ms.ガジェットラティス構造柔軟指による接触の安定化
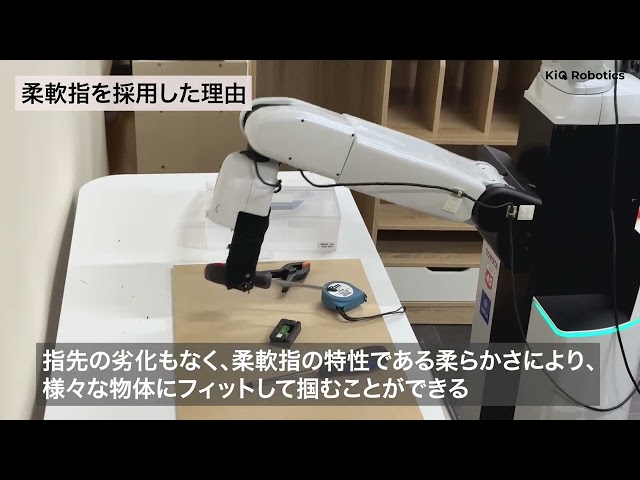
同社が展開する「ラティス構造柔軟指」は、格子状の柔らかい指先がワーク(作業対象物)の形状にならって変形し、面接触で対象物を支えるロボットハンドツールです。これまで多品種ワークの搬送や段取り替えの削減、ワーク傷の低減を目的に製造現場で活用されてきました。
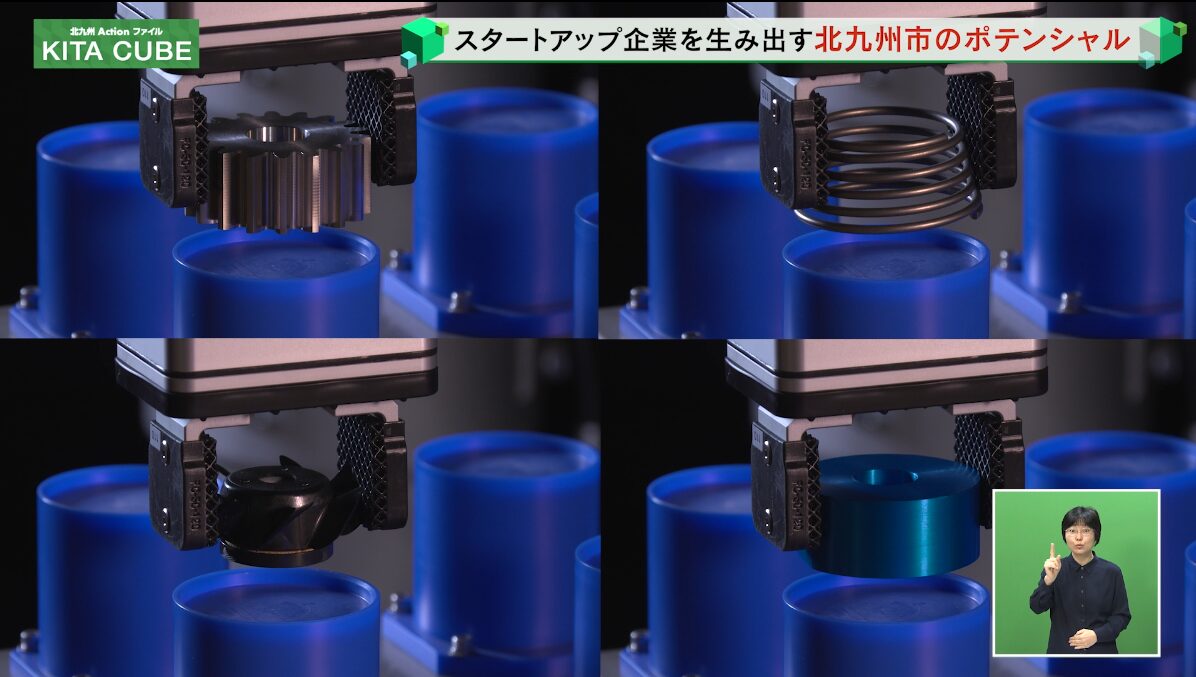
フィジカルAIにおいては、この柔軟指が対象物の位置ずれや形状差を物理的に受け止めることで、AI制御に求められる接触精度の一部を補う役割を果たします。同社は、ロボットが「見て、考えて、動く」だけでなく、現実の対象物に安定して「触れる・掴む」ための接触インターフェースとして、柔軟指のさらなる発展に取り組むとのことです。
Ms.ガジェット開発の方向性と検証体制
開発にあたっては、公開研究であるUMI(Universal Manipulation Interface:ロボット本体を使わずに人の作業データを収集し、実機へ転移するフレームワーク)の考え方を土台の一つとしています。重点的に取り組む項目は以下の通りです。
- 実世界接触の安定化:形状ならい性と面接触により、AI制御が破綻しにくい条件を構築する
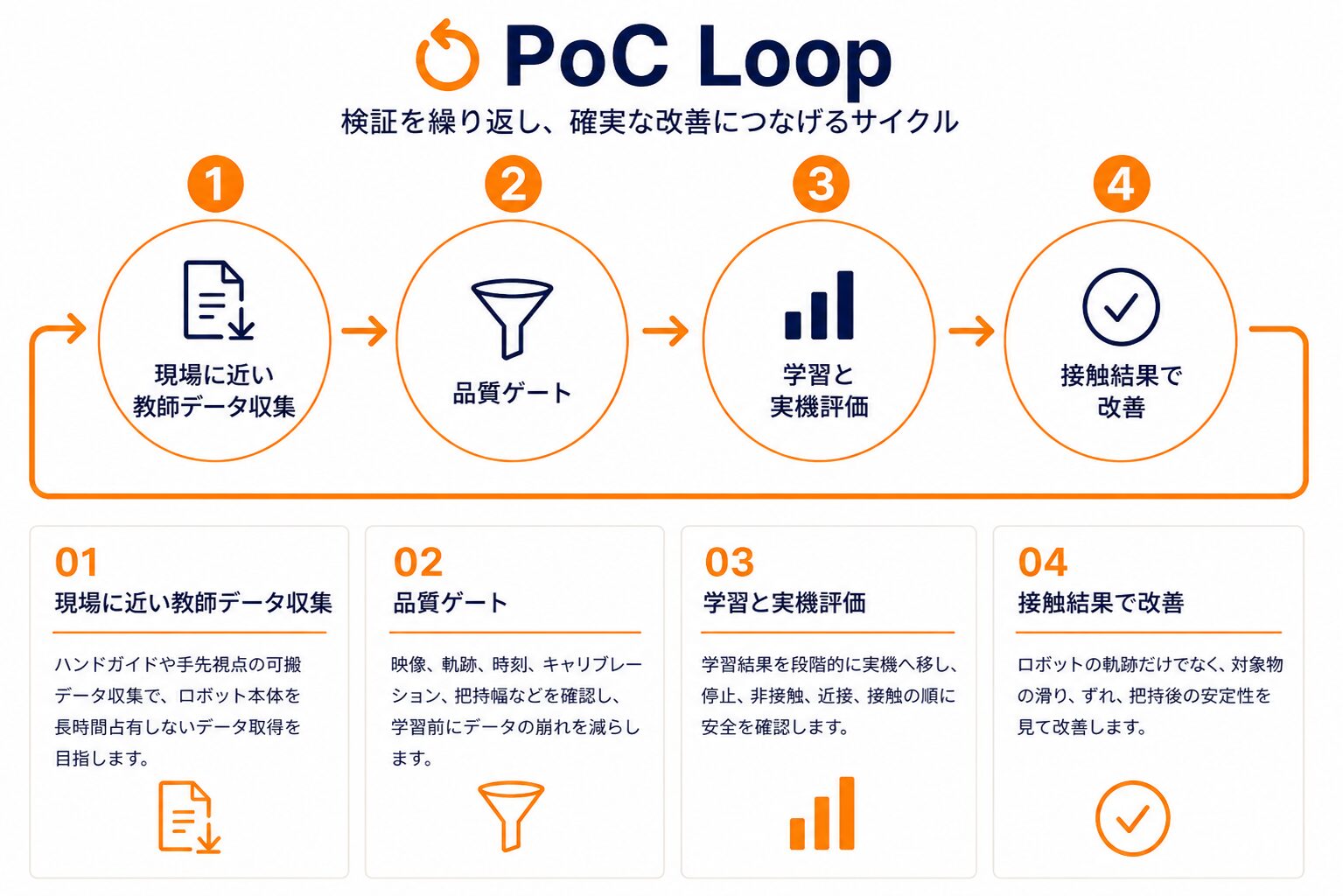
- 可搬データ収集とロボット作業学習:ロボット本体を長時間占有せず、現場に近い環境で教師データを収集する
- データ品質と段階的な実機評価:停止・非接触・近接・接触へと進む段階的な評価を組み合わせる
また、九州工業大学田向研究室の人工知能研究においても、家庭用サービスロボットの動作データ収集に柔軟指が活用されています。同研究室では、指先の合わせ込みが厳密でなくても面接触によって対象物を安定して掴める点が評価されているとのことです。
Ms.ガジェット今後の展望と柔軟指の概要
短期的には、柔軟指が接触時の位置ずれや姿勢ずれをどのように受け止められるかを実機検証し、AI制御と組み合わせた際の作業成立条件に関するノウハウを蓄積する予定です。中長期的には、最新のロボット基盤モデルや模倣学習手法を比較・活用できるよう、現場データと安全確認を組み合わせた開発基盤の構築を目指すとしています。

なお、同社が提供する「ラティス構造柔軟指」の主な特徴は以下の通りです。
| 特徴 | 詳細 |
|---|---|
| 段取り替え削減 | 多品種ワークへの対応が可能 |
| 把持安定化 | 形状差や位置ずれを吸収 |
| ワーク保護 | 硬いチャック爪との直接接触を低減 |
| 設計対応 | 標準品およびオーダーメイド設計に対応 |
2026年4月時点で導入実績は130件を超えており、今後は製造現場の課題解決に加え、フィジカルAI領域における接触インターフェースとしての展開を加速させる方針とのことです。
Ms.ガジェット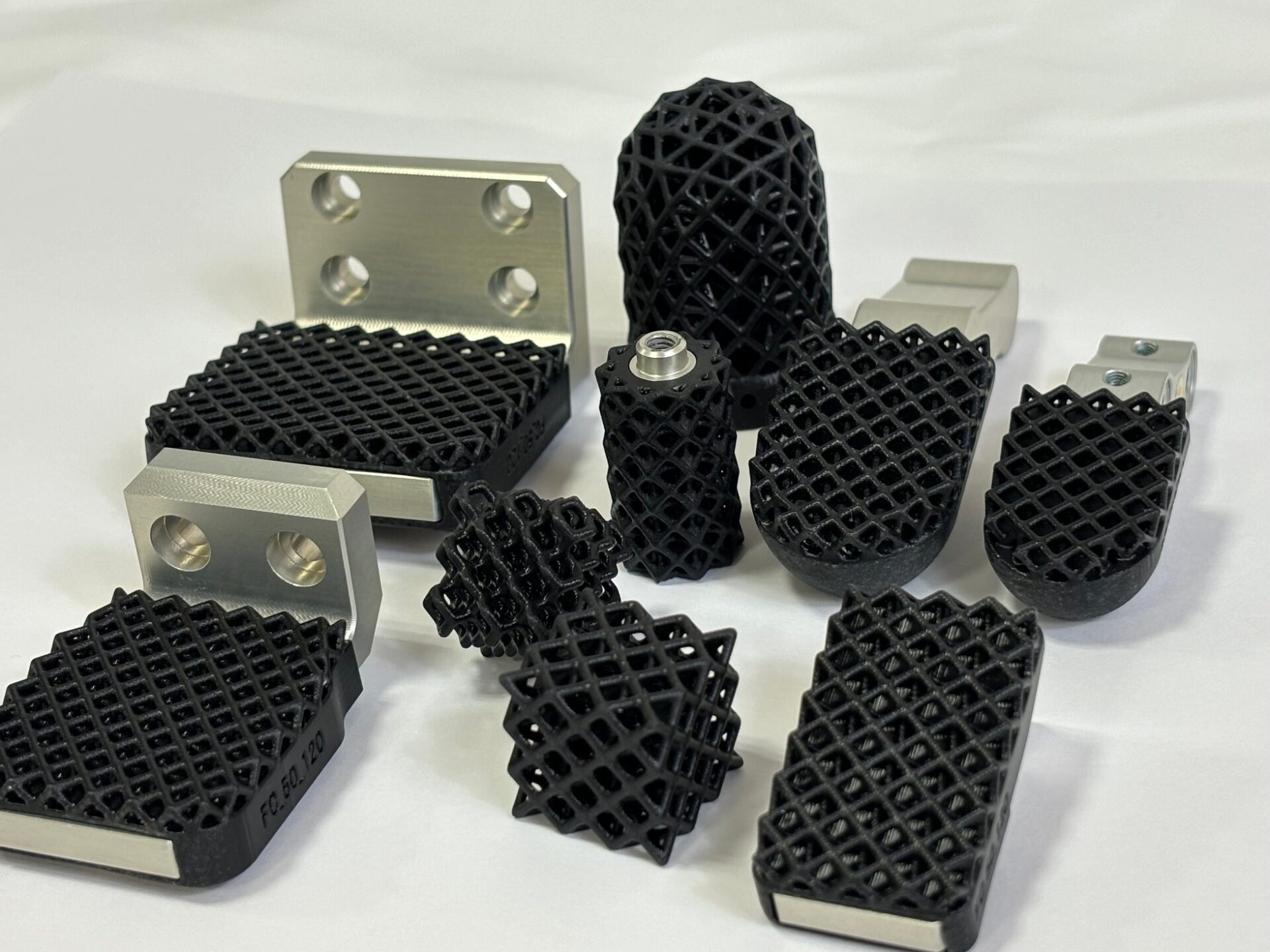



KiQ Robotics ラティス構造柔軟指

最後までお読みいただきありがとうございました!
- 本記事の評価は当サイト独自のものです。
- 特段の表示が無い限り、商品の価格や情報などは記事執筆時点での情報です。
- この情報が誤っていても当サイトでは一切の責任を負いかねますのでご了承ください。
- 当サイトに記載された商品・サービス名は各社の商標です。
- 本記事で使用している画像は、メディアユーザーとしてPR TIMESより提供されたプレスリリース素材を利用しています。