
目次
介護領域におけるAIヒューマノイドの可能性
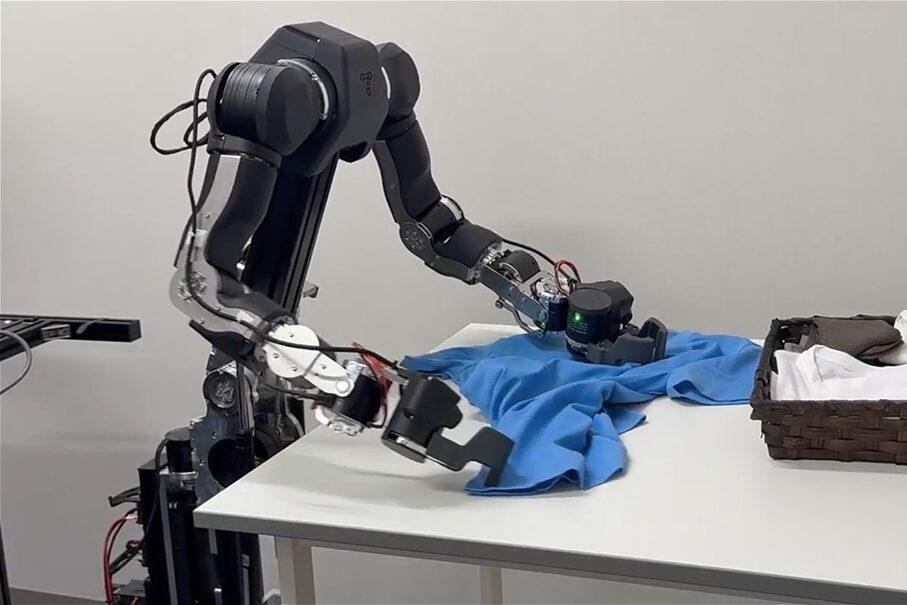
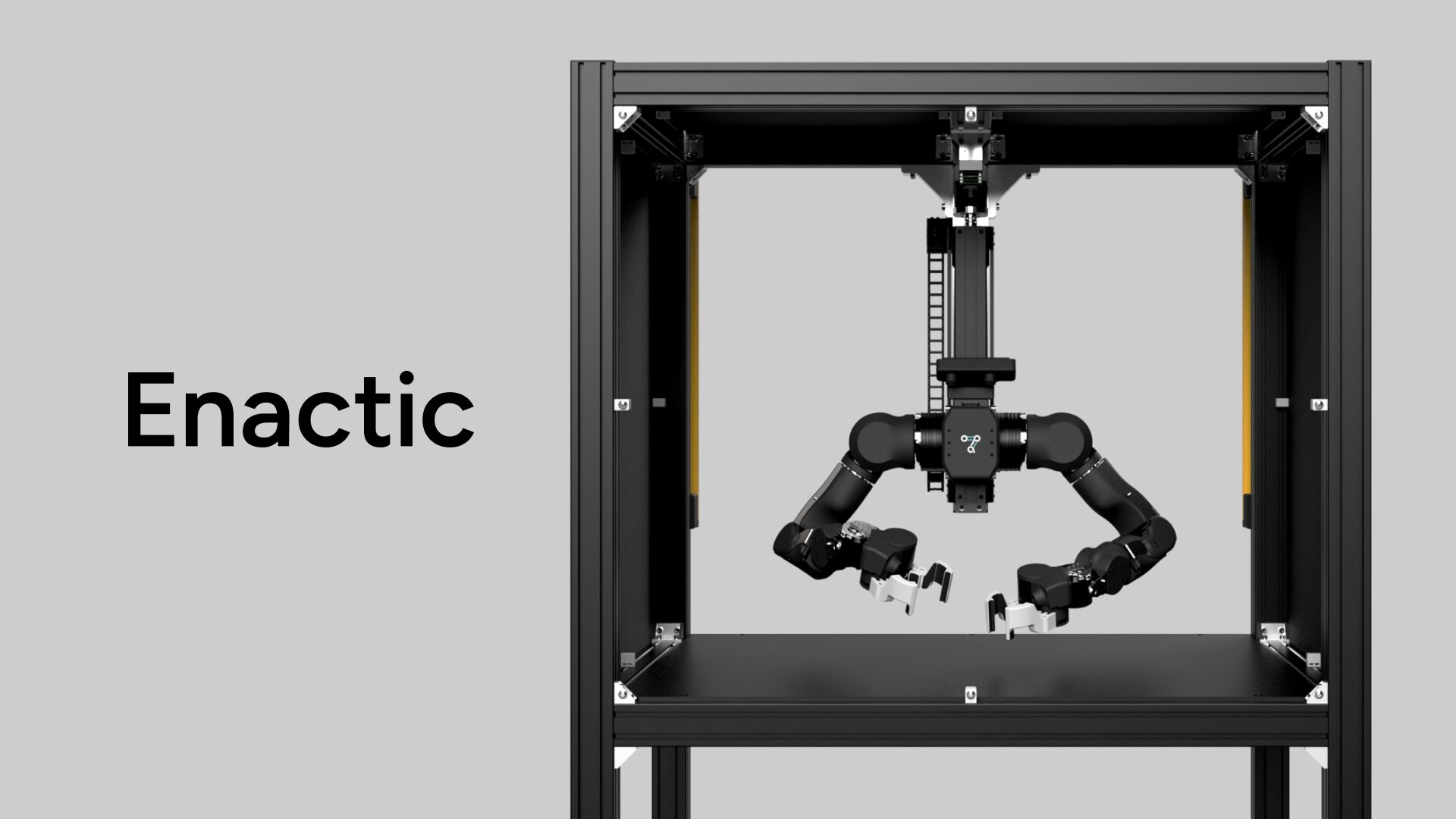
株式会社Enacticは、NVIDIAが提供するヒューマノイドロボット向け基盤モデルの最新版「NVIDIA Isaac GR00T N1.7」を活用し、介護現場での実用性検証を開始しました。同社はこれまで培ってきた介護現場の業務要件に関する知見と、オープンソース双腕ロボット「OpenArm 2.0」を組み合わせることで、ロボットの社会実装を推進するとしています。
深刻化する介護人材不足という社会課題に対し、非定型作業への適応能力を高めた次世代のロボットアーキテクチャを構築することが目的です。同社は、複雑な生活空間における自律的な動きを実現し、現場の生産性向上に寄与する方針を説明しています。
 Ms.ガジェット
Ms.ガジェット介護現場のような流動的な環境で、ヒューマノイドがどの程度柔軟に作業をこなせるようになるのか、実用化に向けた重要な一歩となりそうですね。
検証プロジェクトの実施内容
今回の取り組みでは、以下の3つの軸を中心に開発と検証が進められるとのことです。
- 介護現場のサンプルタスクにおける基盤モデルの実用性検証と最適化
- 自社プラットフォーム「OpenArm 2.0」を用いた実機検証
- 実際の介護施設環境における実機検証
まずは実際の介護業務から抽出したタスクを評価し、安全性や汎化性(未知の状況への対応力)を検証します。その後、施設での実運用を想定した環境で、現場スタッフの知見も取り入れながら動作確認を行う予定となっています。
Ms.ガジェット実際の介護施設で検証を行うことで、シミュレーションだけでは見えてこない現場特有の課題を洗い出せる点が大きな強みと言えます。
NVIDIAのテクノロジーを活用したシステム開発
本プロジェクトでは、NVIDIAのフルスタックなフィジカルAIテクノロジーが全面的に活用されます。具体的な使用技術は以下の通りです。
| 項目 | 技術・ツール |
|---|---|
| 基盤モデル | NVIDIA Isaac GR00T Nシリーズ |
| シミュレーション | NVIDIA Isaac Sim、Isaac Lab |
| 世界基盤モデル | NVIDIA Cosmos、DreamZero |
| 学習・推論 | NVIDIA DGX H100、Jetson Thor |
今回採用された「Isaac GR00T N1.7」は、人間の一人称視点映像を用いた学習や、強化された視覚言語理解バックボーンを備えています。これにより、少ないデータ量でもヒューマノイドが多様なタスクに適応できるよう設計されているとのことです。
Ms.ガジェット大規模な計算リソースと高度なシミュレーション環境を組み合わせることで、開発期間の短縮が期待できそうですね。

Enactic、介護現場でのヒューマノイド実用性検証

最後までお読みいただきありがとうございました!
- 本記事の評価は当サイト独自のものです。
- 特段の表示が無い限り、商品の価格や情報などは記事執筆時点での情報です。
- この情報が誤っていても当サイトでは一切の責任を負いかねますのでご了承ください。
- 当サイトに記載された商品・サービス名は各社の商標です。
- 本記事で使用している画像は、メディアユーザーとしてPR TIMESより提供されたプレスリリース素材を利用しています。