
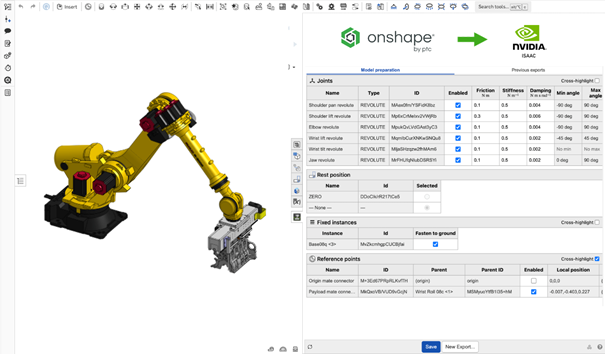
PTCは、同社のクラウドネイティブなコンピュータ支援設計(CAD)プラットフォーム「Onshape」と、NVIDIAのオープンシミュレーションフレームワーク「NVIDIA Isaac Sim」を接続するロボティクス向け設計からシミュレーションまでのワークフローを発表しました。この新ワークフローは、NVIDIA GTC 2026にて紹介され、単一の信頼できるデータソース(Single Source of Truth)を維持しながらロボット設計をシミュレーションできます。
ワークフローの概要
従来、ロボット設計ではCADモデルをエクスポートした後、シミュレーション用に物理的要素を再作成する手作業が発生していました。OnshapeとIsaac Simを連携させた本ワークフローでは、Onshape上で一度定義した機械的な関係性をそのままIsaac Simに引き継ぐことが可能です。設計が変更されるとシミュレーションも自動的に更新されるため、FANUC America Corporationのような企業がCADから物理ベースのシミュレーションへより迅速に移行できるよう支援します。

 Ms.ガジェット
Ms.ガジェット
主な利点
この統合によって、以下の利点が期待されます。
- 時間短縮:設計からシミュレーションへの移行が数分で可能
- エラー削減:手作業による再作成を回避
- 開発の加速:継続的な反復作業の効率化
- フィジカルAIの実現支援:NVIDIA Isaac Labにおけるロボットトレーニングへの接続
これにより、エンジニア、研究者、AI開発者は、シミュレーション用モデルの準備作業ではなく、挙動の検証や性能向上に集中することができます。
Ms.ガジェットユーザー事例と声
FANUC America Corporation オートメーションシステムグループ ゼネラルマネージャーのAmar Dhaliwal氏は、次のように述べています。「OnshapeとNVIDIA Isaac Simの統合により、産業用ロボットシステムの設計および評価プロセスに、より早い段階からシミュレーションを取り入れることが可能になります。この早期の課題認識によって、より適切な設計判断、迅速な統合、そして円滑なプロジェクト遂行が可能となり、お客様は自動化への投資から最大限の成果を得ることができます。」
Ms.ガジェット技術的な基盤
この連携は、Amazon Web Services(AWS)上に構築されたクラウドネイティブアーキテクチャによって実現されています。開発プロセス全体を通じて設計とシミュレーションの同期を維持し、継続的かつコラボレーティブな設計を支えます。PTCのOnshapeおよびArenaのEVP兼ゼネラルマネージャーDavid Katzmanは、「NVIDIAとの協業により、継続的かつコラボレーティブな設計におけるOnshapeの強みと、世界最高水準のシミュレーション技術を組み合わせ、ロボティクスエンジニアリングの未来を支えるフィジカルAIの基盤構築を支援します」と述べています。
Ms.ガジェット
紹介イベント
OnshapeとIsaac Simのワークフローは、2026年3月16日から19日まで米国カリフォルニア州サンノゼで開催されるNVIDIA GTCにて紹介されました。会期中には、追加の技術セッション、パートナーコンテンツ、顧客事例も提供されています。NVIDIAのOmniverseおよびシミュレーション技術担当バイスプレジデントRev Lebaredian氏は、「ロボティクス開発は、設計と物理的に正確なシミュレーションの間にある継続的なフィードバックループに依存しています。PTCのクラウドネイティブなOnshapeプラットフォームをNVIDIA Isaac Simに接続することで、さまざまな設計変更が瞬時にシミュレーションへ反映され、迅速な反復とインテリジェントマシンの開発スケールを可能にします」と述べています。
Ms.ガジェット
最後までお読みいただきありがとうございました!
- 本記事の評価は当サイト独自のものです。
- 特段の表示が無い限り、商品の価格や情報などは記事執筆時点での情報です。
- この情報が誤っていても当サイトでは一切の責任を負いかねますのでご了承ください。
- 当サイトに記載された商品・サービス名は各社の商標です。
- 本記事で使用している画像は、メディアユーザーとしてPR TIMESより提供されたプレスリリース素材を利用しています。