
目次
ローカル5Gを活用した次世代インフラ点検の実証実験
株式会社Liberawareは、東京都が実施する「次世代通信技術活用型スタートアップ支援事業(Tokyo NEXT 5G Boosters Project)」の一環として、四足歩行ロボットを活用した次世代インフラ点検ソリューションの実証実験を実施しました。本プロジェクトは、TIS株式会社の支援のもと行われています。

今回の実証実験では、東京都立大学の実環境フィールドが活用されました。閉鎖空間や高所、狭所など、点検業務において作業者の負担が大きい環境での活用を想定し、安全かつ効率的なインフラ点検モデルの構築を目指しています。
 Ms.ガジェット
Ms.ガジェットロボット技術とローカル5Gを組み合わせることで、危険な場所の点検を安全に行おうとする取り組みですね。
デジタルツイン構築に向けた検証内容
本実証では、株式会社アプトポッドのIoTデータプラットフォーム「intdash(イントダッシュ)」を使用し、取得したデータをデジタル空間上に再現するデジタルツイン(現実世界の情報を仮想空間に再現する技術)の構築検証が行われました。主な検証項目は以下の通りです。
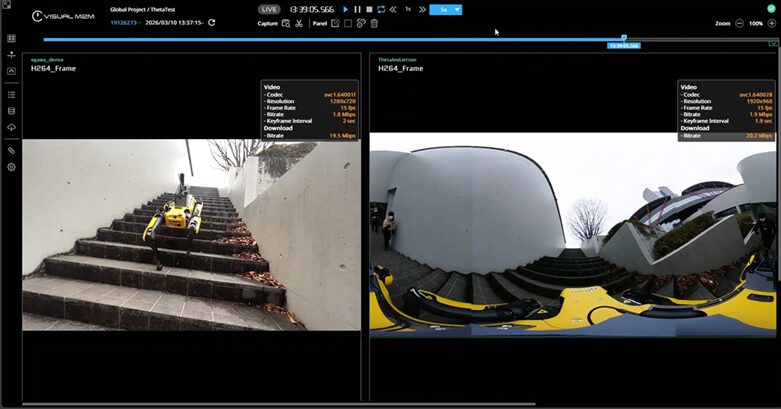
- 四足歩行ロボットによる複雑環境での自律走行および走破性の確認
- ロボットが撮影したデータによる現場状況把握の有効性検証
- ローカル5Gとキャリア通信を組み合わせたハイブリッド環境での通信品質検証
- intdashによる映像・位置情報・センサーデータの統合・可視化
検証の結果、段差や障害物のある環境においてもロボットが安定した移動性能を発揮し、遠隔からの状況把握が可能な品質のデータを収集できることが確認されています。
Ms.ガジェット屋内外の複雑な環境で安定したデータ収集ができるというのは、実運用において重要なポイントですね。
今後の展開とインフラ管理の高度化
Liberawareは、今回の実証で得られた知見を基に、サービスローンチに向けた検証を継続する予定です。今後もTokyo NEXT 5G Boosters Projectを通じて、以下の観点での検証を深めていくとのことです。

- ロボットによる点検業務の代替および効率化の推進
- データ活用による保全業務の高度化
- 実運用を見据えたサービスモデルの確立
将来的には電力、プラント、建設、公共インフラなど幅広い分野への展開を目指しており、社会インフラの維持管理における課題解決と高度化への貢献が期待されています。
Ms.ガジェットインフラの老朽化が進む中で、こうしたロボットによる自動化技術は今後ますます重要になりそうですね。





Liberaware、ローカル5Gを活用した四足歩行ロボットの実証実験を実施

最後までお読みいただきありがとうございました!
- 本記事の評価は当サイト独自のものです。
- 特段の表示が無い限り、商品の価格や情報などは記事執筆時点での情報です。
- この情報が誤っていても当サイトでは一切の責任を負いかねますのでご了承ください。
- 当サイトに記載された商品・サービス名は各社の商標です。
- 本記事で使用している画像は、メディアユーザーとしてPR TIMESより提供されたプレスリリース素材を利用しています。